お客様の相談内容 |
 |
|
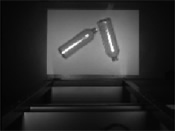
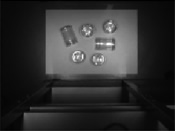
画像処理情報を元にロボットがピッキングできるように、コンベア上のプラスチック容器の位置や向きを把握できるようにしてマシンビジョン検査ピッキング装置を導入したい。 |
画像処理結果イメージ |
|
|
(単位・・・位置:mm 角度:°) |
|
|
|
検査位置 |
|
入力画像 |
|
出力画像 |
|
備考 |
|
|
|
| 1-1 |
|
 |
|
 |
|
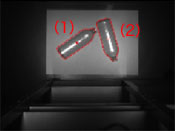
(1) 位置:(353, 199)
角度:35
(2) 位置:(499, 181)
角度:286 |
|
| 3-1 |
|
 |
|
 |
|
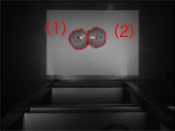
(1) 位置:(363, 181)
角度:34
(2) 位置:(483, 173)
角度:176 |
|
| 4-1 |
|
 |
|
 |
|
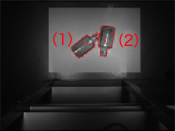
(1) 位置:(393, 205)
角度:38
(2) 位置:(485, 186)
角度:260 |
|
| 7-1 |
|
 |
|
 |
|
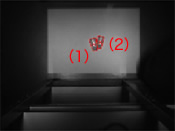
(1) 位置:(431, 206)
角度:284
(2) 位置:(460, 196)
角度:261 |
|
| 8-1 |
|
 |
|
 |
|
(1) 位置:(315, 165)
角度:292
(2) 位置:(482, 203)
角度:178
(3) 位置:(401, 141)
(4) 位置:(503, 124)
(5) 位置:(359, 261)
(6) 位置:(450, 274) |
|
成果 |
|
|
プラスチック容器の位置および向きを画像処理により算出が可能となった。また、透明な容器を背景に比べて暗く撮影することで安定したワーク抽出が画像処理で可能となった。
立った状態にあるワークの上下の区別に課題を残すが、サンプル追加および追加テストにより安定した性能確立は可能である。 |