お客様の相談内容 |
 |
|
通い箱にランダムの姿勢に置かれたワークを画像処理で認識してピッキングし、所定場所にセットして欲しい。 |
提案内容 |
|
|
概要
通い箱等にランダムに投入されたワークの3次元認識を行い、ロボットによりピッキングを行う。ピッキング後は、コンベア等へパレタイジング処理を行いワークセットを行う。コンベアセット満載後、コンベアを駆動しセットしたワークを通い箱へ再投入する。
|
ワーク形状:円筒ワーク(φ40x100L程度)
ロボットハンドリング方式:吸着方式+ワークガイド方式
|
|
3次元ランダムピッキング設定条件 |
|
|
設備条件【シュミレーション条件】
|
ロボット
型式:VP-6242F
可搬重量: 2.5Kg
稼働アーム長: 650mm
ロボットハンド仕様
ハンドリング方式: 吸着方式
ハンドリング数: 1ヶ取り
カメラ/照明仕様
カメラ: 40万画素モノクロエリアCCD+レンズ
照明: LED 擬似同軸照明装置
|
|
3次元ピッキングイメージ |
|
|
ロボットシュミレーション動作には、画像入力動作、及び回転動作は含まれていない。
動画のサイクルタイムは21sec
内部速度設定
通常搬送時: 90%
投入・取出動作時: 30%
その他: 90%
|
|
|
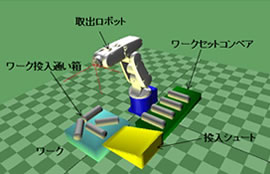 |
シュミレーション条件説明図 |
|